Building my own robotics framework
Posted on April 4, 2022 by Zach Lambert ‐ 1 min read

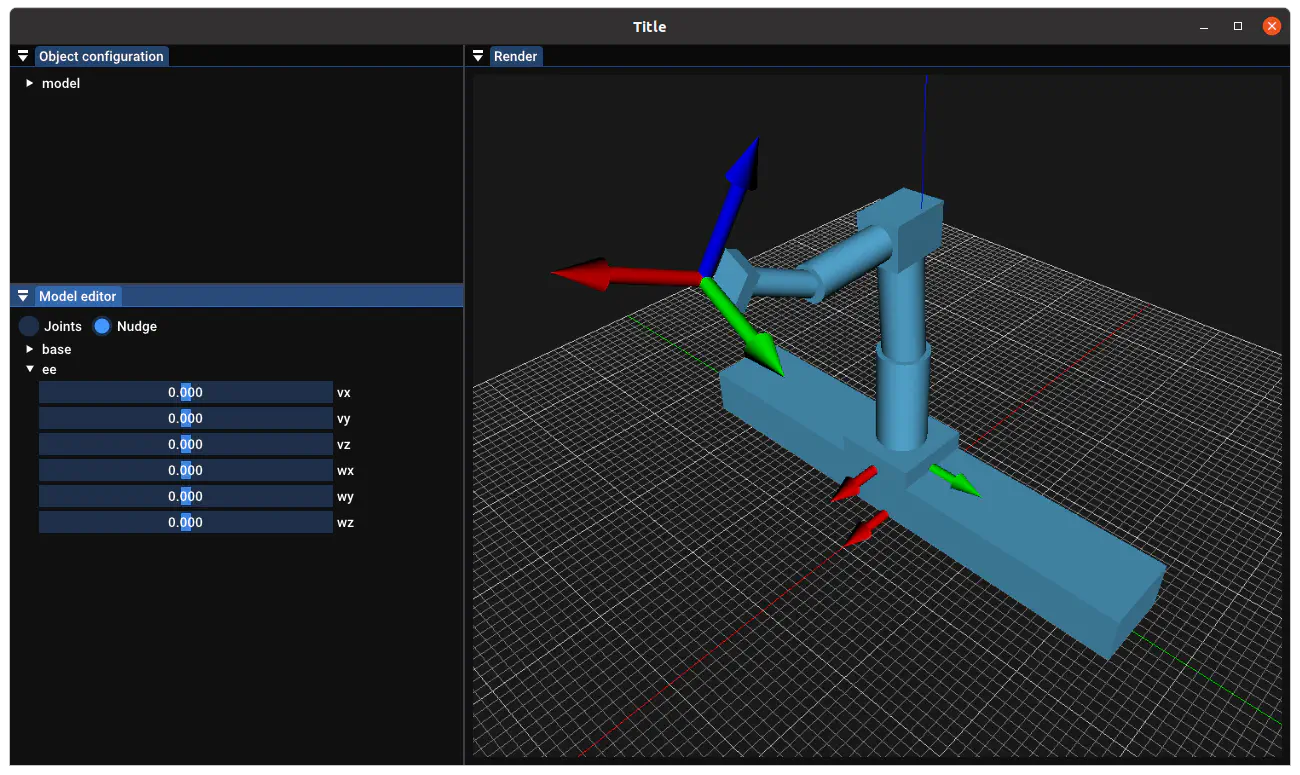
Alongside this website, I am working on my own robotics framework.
Below shows the current state, which has an opengl renderer, a robot model, and
some basic kinematics for forward kinematics and the ability to nudge the end-effector.
The purpose for building my own framework (over ROS for example) is:
- I have a different idea about how to go about designing robotic systems, which I would like to have a go at implementing.
- It will provide an engaging way for me to learn various different robotics topics and how to integrate them into a complete system.
- I like taking on challenging projects.
Initially, the plan with this website is to document notes I make on robotics topics, and create blog posts to log the progress I make on the framework.
At some point, the notes will also be coupled with relevant documentation of how the topic is applied in the framework.